- Computer Vision
-
Camera Calibration, Epipolar Geometry, Optical Flow, Segmentation, Object Tracking,
3D Reconstruction
- Machine Learning
-
Bayesian Filtering, SVM, GMM, HMM, Clustering, Reinforcement Learning
- Deep Learning
- CNN, RNN, Transformers, Diffusion Models
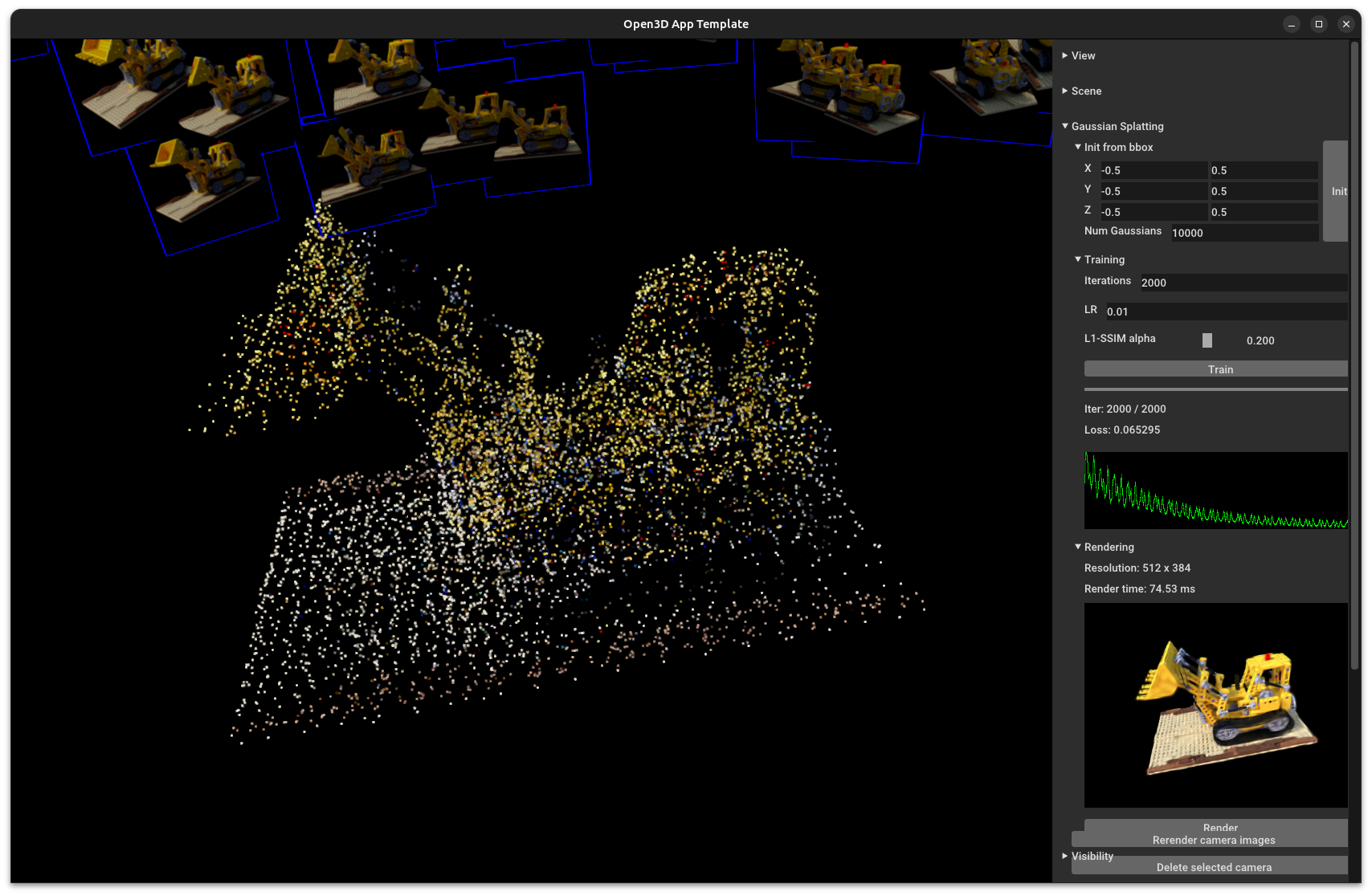
- 3D & GPU
-
PyTorch (advanced tensor ops), CUDA, Open3D, Gaussian Splatting (3D)
- Programming
- Python, C++, OpenCV, NumPy, Eigen
- Robotics
- ROS, SLAM, Kinematics, Inverse Kinematics, Motion Planning, Control Systems
- Systems & Tools
-
Linux, Docker, Git, CMake, Bash, Unreal Engine (C++, Blueprints), Blender (3D modeling)
- LLM & AI Systems
- RAG, LangChain, vLLM, Agent-based systems
- Cloud
- AWS, Azure
- Languages
- Korean (Native), English (Fluent), German (Basic)